Introduction
Hey there! I'm Andrii - a 1st-year Tron student at Waterloo. For a while, I have wanted to tackle a serious solo robotics project, and this is the result.
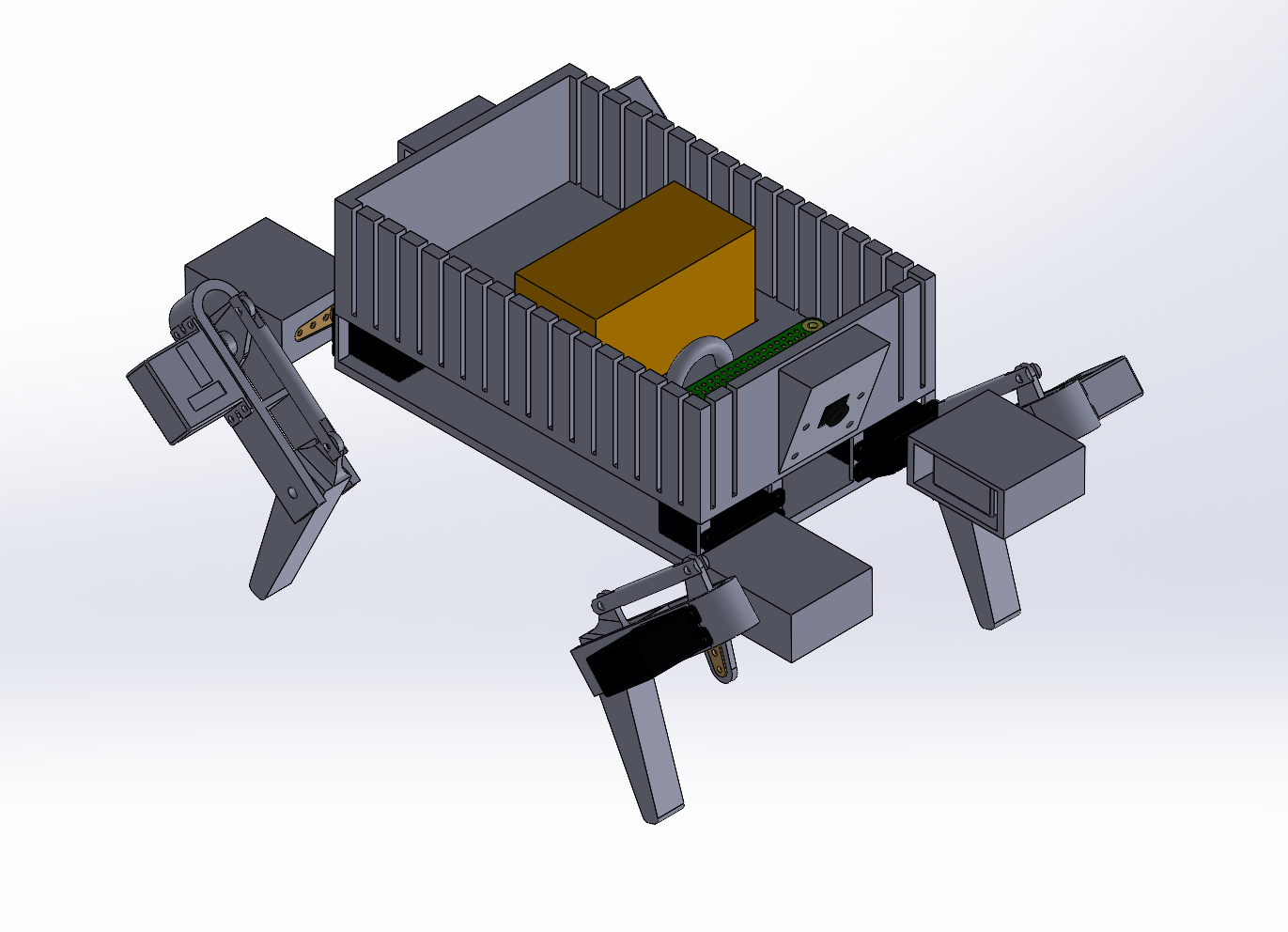
In short, the goal is to build a quadruped robot (think Boston Dynamics) that can also transition into flight mode ** (aka quadcopter). It is a unique challenge that will force me to get hands-on with a massive set of tools, including CAD, kinematics, ROS, simulations, 3D printing, electronics, vision processing**, and more.
What you are looking at is an early version of the documentation for this project. I split it into two main parts:
- Devlog: frequent progress updates.
- Engineering: technical deep dives and decisions.
I don’t have a set timeline or a final vision yet, so the scope is bound to change as I work through this project...